KoZoDo
Blog KoZoDo
Bon ben, l'artefact extrait d'un ersatz de bout de maquette de prototype de prise de vue robotisée commence à bouger un peu.
Dans les deux précédents articles je décrivais le support de développement pour un projet de robotique.
Ce projet consiste en un système de prise de vue robotisée verticale.
Je voulais voir si le concept était réalisable avec des 'moyens simple'. Et il semble que cela soit faisable en utilisant Arduino pour la partie contrôleur. C'est un peu plus délicat pour la partie mécanique.
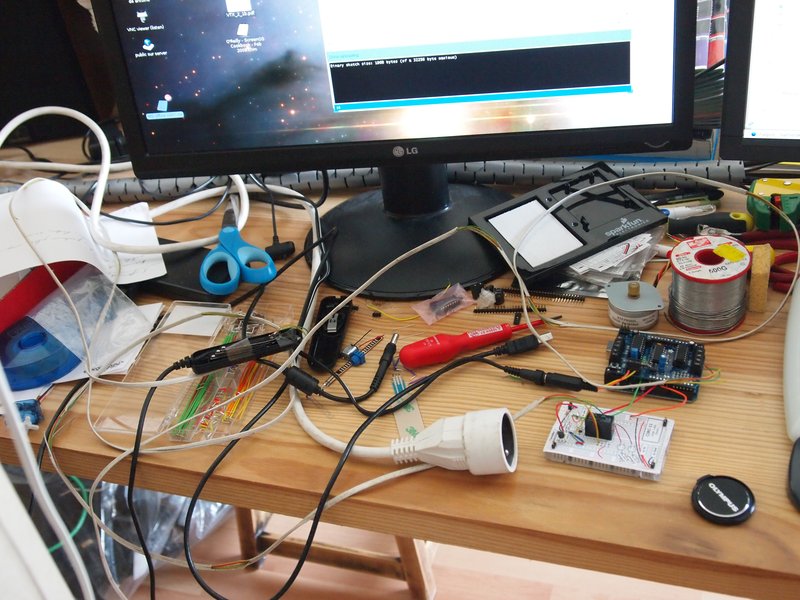
L'antre du bricoleur est la suivante :
C'est un peu le chantier mais ça va s’éclaircir :
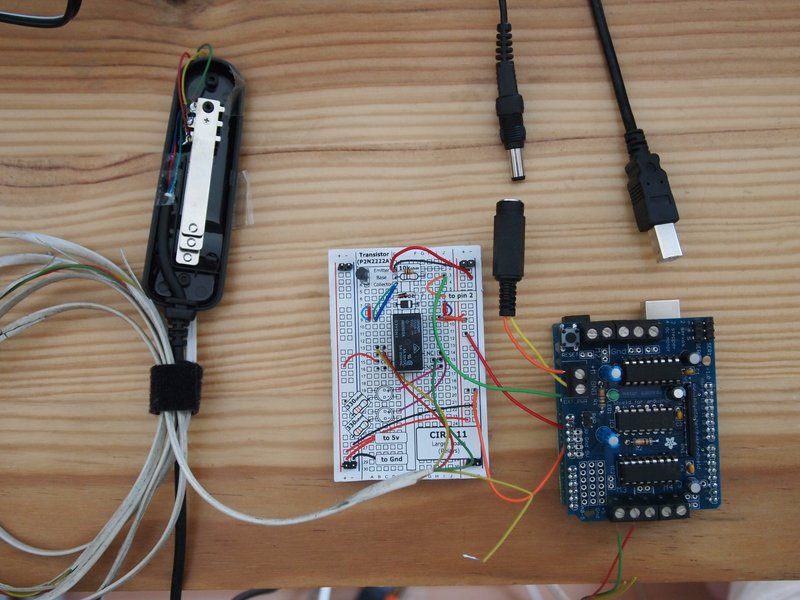
et le montage Arduino avec le kit motor shield d'Ardafruit, la commande filaire de prise de photo asservie à un petit montage comprenant un relai contrôlé par la carte Arduino :
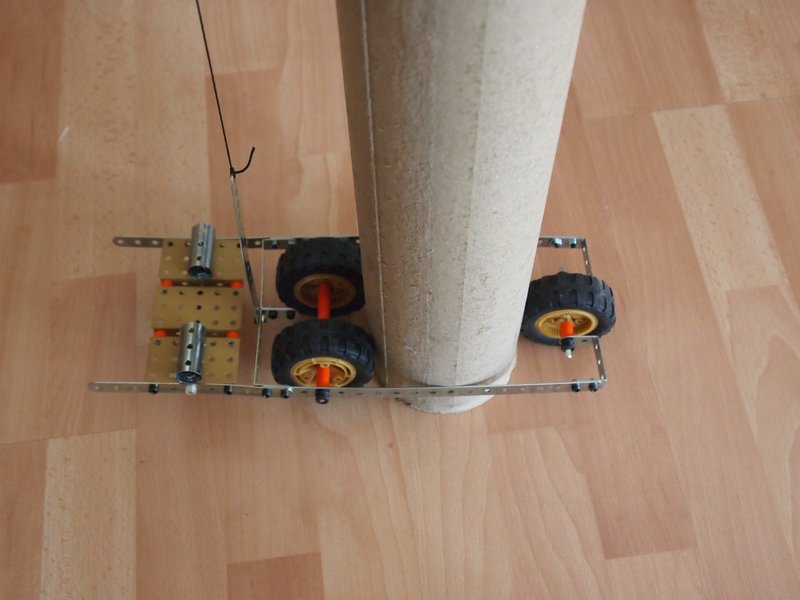
La partie mécanique est la suivante (on garde son calme !) :

Une fois en mouvement ça donne ça :
Et les images prises pendant l'opération :

























Bon c'est clairement de travers mais ça monte.
Le code Arduino pour ce système est :
#include <afmotor.h> int move_up = 10000; int stabilise = 1000; int steps = 10; AF_DCMotor motor(3, MOTOR12_1KHZ); void setup() { pinMode(13, OUTPUT); digitalWrite(13, HIGH); motor.setSpeed(255); } void loop() { motor.run(BACKWARD); delay(50000); for (int i = 0; i < steps; i++) { motor.run(FORWARD); delay(move_up); motor.run(RELEASE); delay(stabilise); digitalWrite(13, HIGH); delay(stabilise); digitalWrite(13, LOW); delay(stabilise); digitalWrite(13, HIGH); } motor.run(FORWARD); delay(steps * (move_up + 3 * stabilise)); }Et voilà, il resterai à tout refaire proprement, autant la partie mécanique que les fonctions du contrôleur.
A la prochaine.
Antoine