KoZoDo
Blog KoZoDo
J'ai acheté il y a pas mal de temps, un petit flexible avec embouts de "précision" qui se branche sur un aspirateur ordinaire grâce à une bague d'adaptation. Mai mon dernier balai aspirateur ROBOROCK H6M1A utilise un tuyau spécial avec un connecteur électrique intégré pour alimenter la brosse motorisée. Pour brancher mon petit flexible, j'ai conçu et imprimé un adaptateur sur mesure.
Beta :
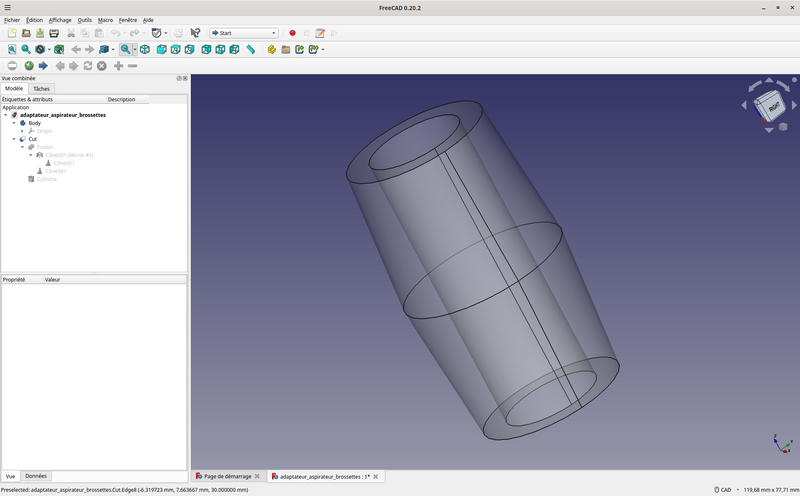
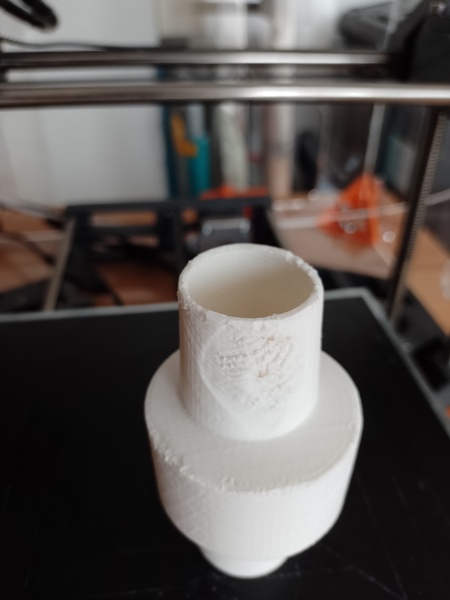
J'ai commencé par faire un adaptateur basique à base de deux simples connes dos-à-dos, et avec un simple trou en forme de cylindre. Ce système tien par force et fonctionne à peu près correctement, mais il glisse parfois, car il n'utilise pas l'accroche intégrée au bloc aspirateur :
Version "Pro" :
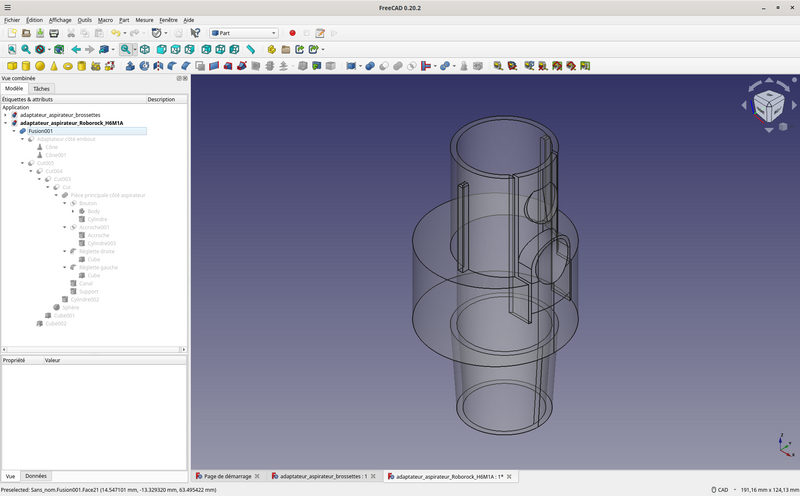
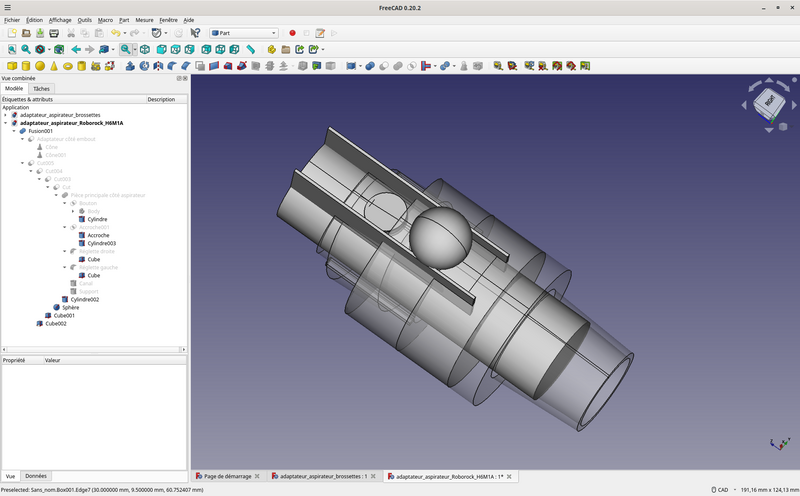
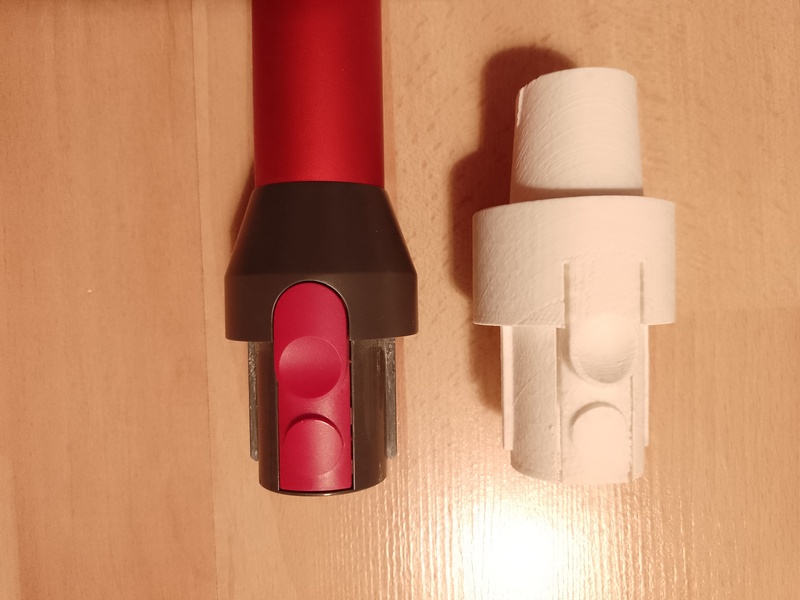
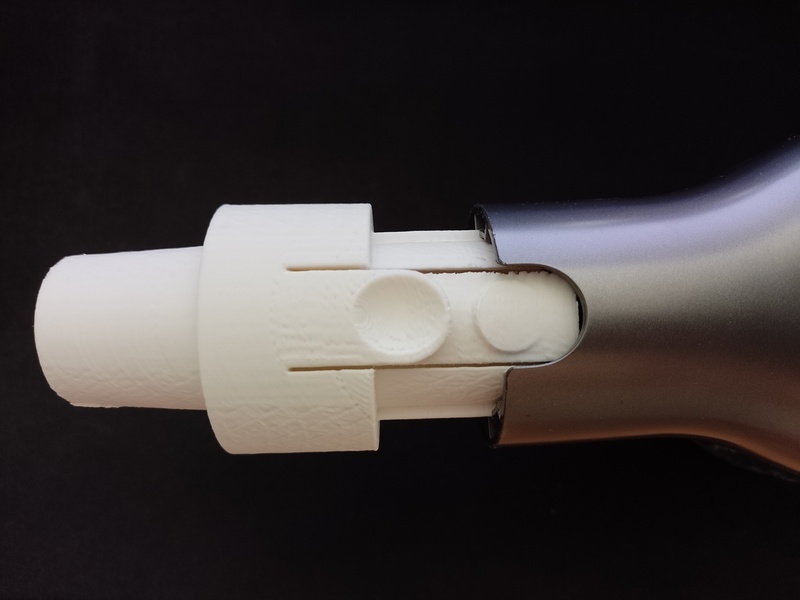
J'ai donc pris toutes les mesures nécessaires pour modéliser le même système d'accroche que le tuyau officiel de l'aspirateur (sans y intégrer la connectique électrique) sous FreeCAD.
La souplesse du PLA est suffisante pour avoir un bouton d'arroche qui se désengage simplement sans pression excessive.
Côté petit flexible, j'ai utilisé le même insère que celui de l'adaptateur de base :
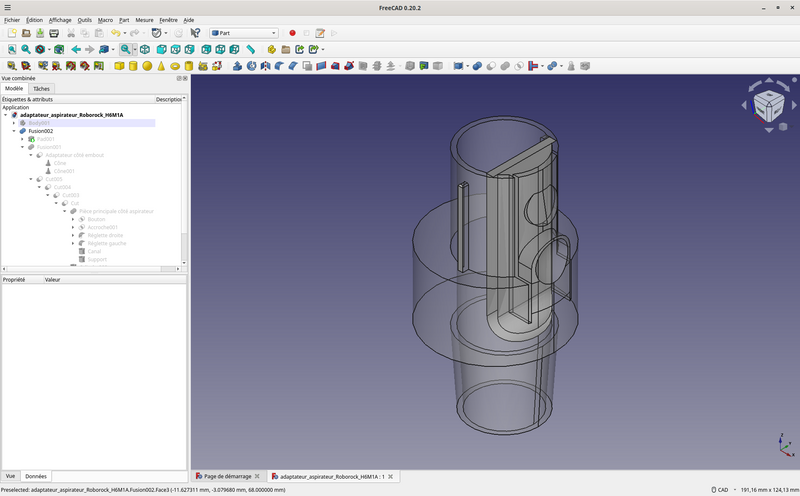
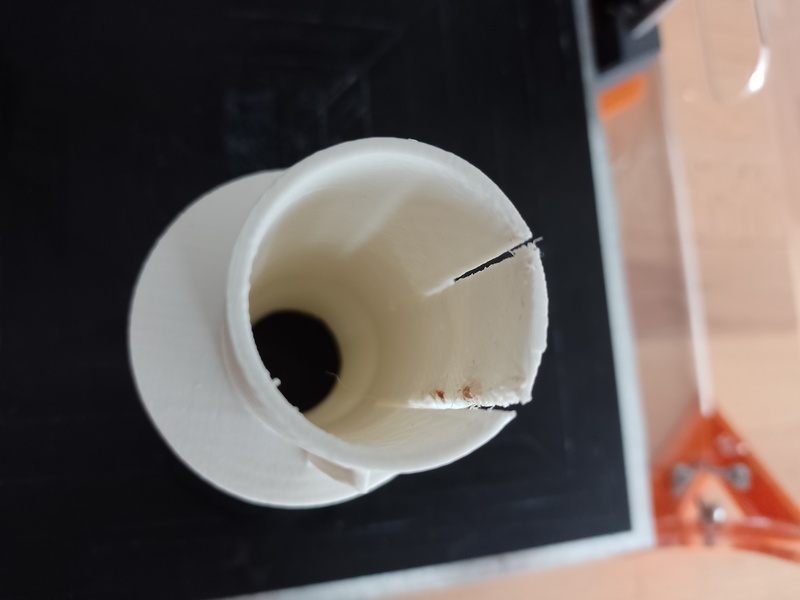
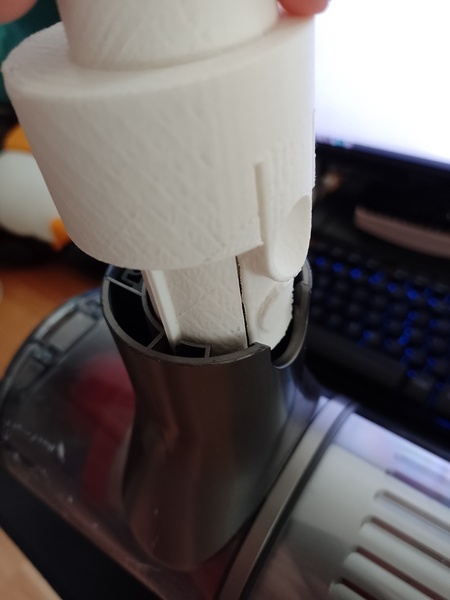
Opps ! après les tests j'ai eu énormément de fuite d'air, et j'ai vu que j'avais oublié une pièce d'isolation du conduit autour du bouton, j'ai donc corrigé ce point dans le modèle 3D :
Modèle FreeCAD et fichier STL.
Impression :
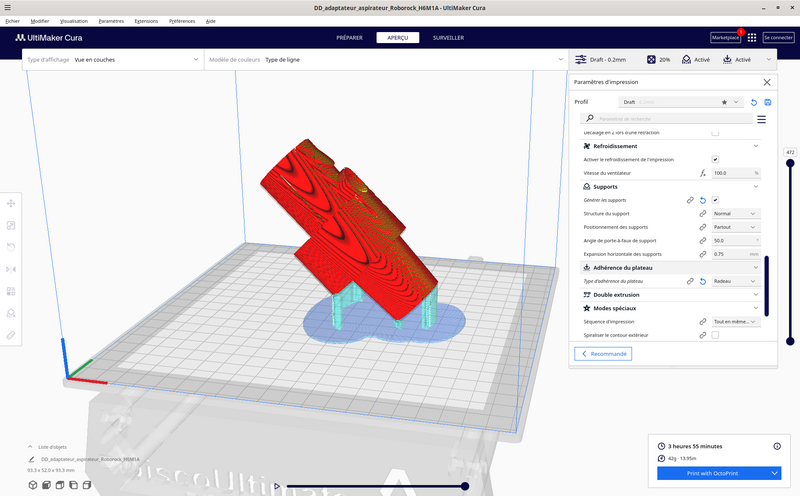
Pour l'impression, il suffit d'incliner le modèle de 45° pour avoir le moins de support possible (note: en fait pour la version corrigée, l'utilisation de supports arborescents est préférable).
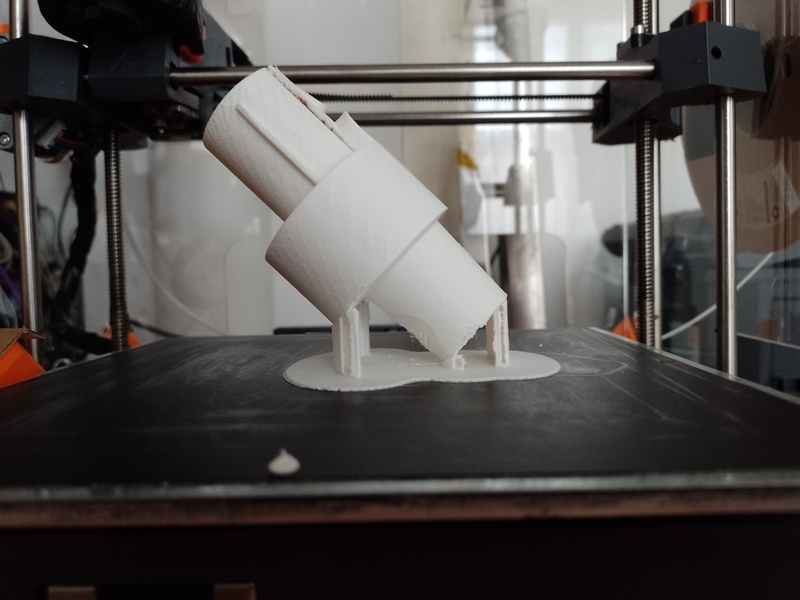
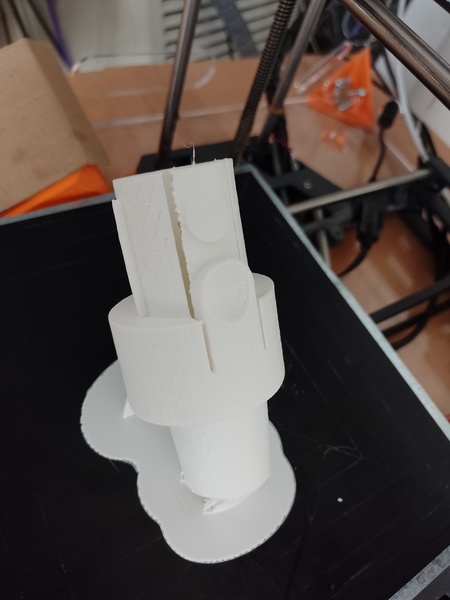
J'ai eu quelques défauts de qualité d'impression mais cela est dû à mon filament qui n'a pas été utilisé depuis quelques mois, et il a certainement pris un peu d'humidité (note: les photos sont celles de la version non corrigée) :
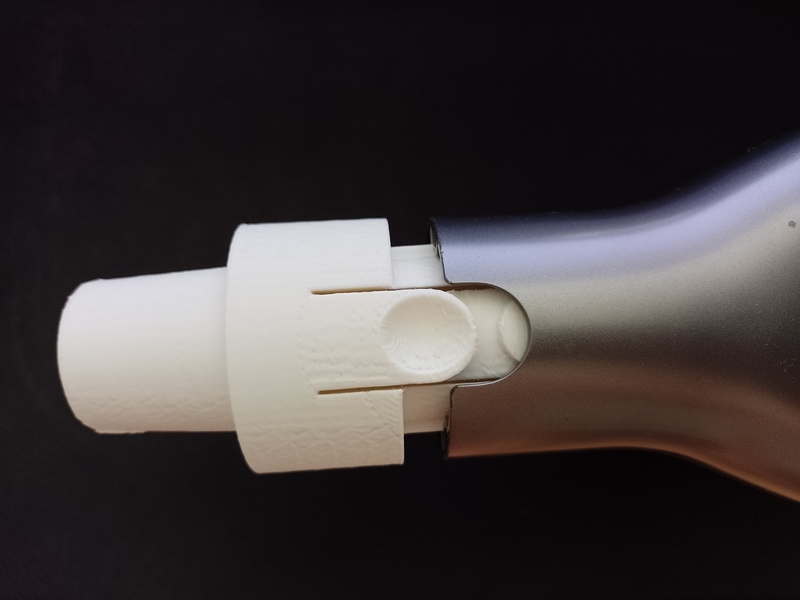
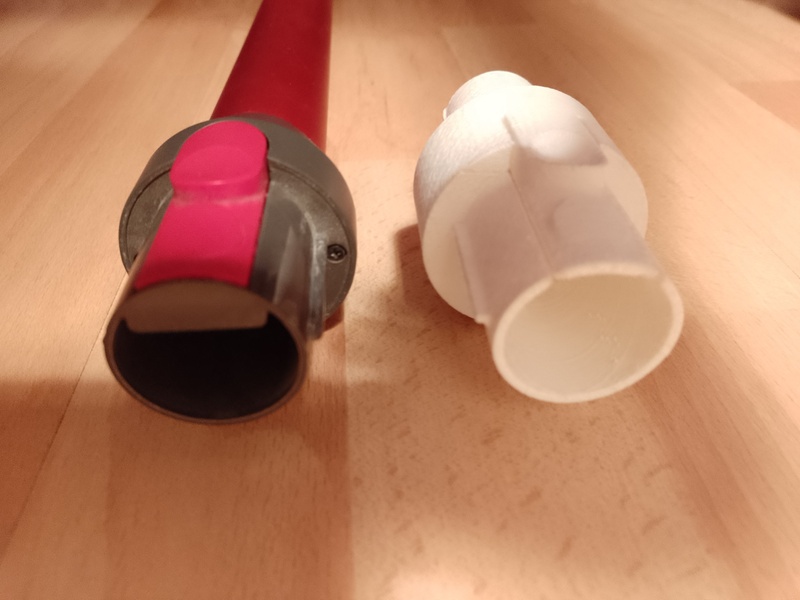
La souplesse relative du PLA suffit pour rendre le bouton fonctionnel sans avoir besoin de mettre trop de pression :

L'insertion et le clipsage de l'adaptateur sont excelents :




Amélioration possible :
- utiliser un flexible brut et faire la connexion à ce flexible directement dans l'impression 3D
- réaliser les brossettes en impression 3D
Bonne journée
Antoine